~pipe robot~
step 1: join a team
s/o locomotion team @jim and @sam
step 2: prototype, prototype, prototype
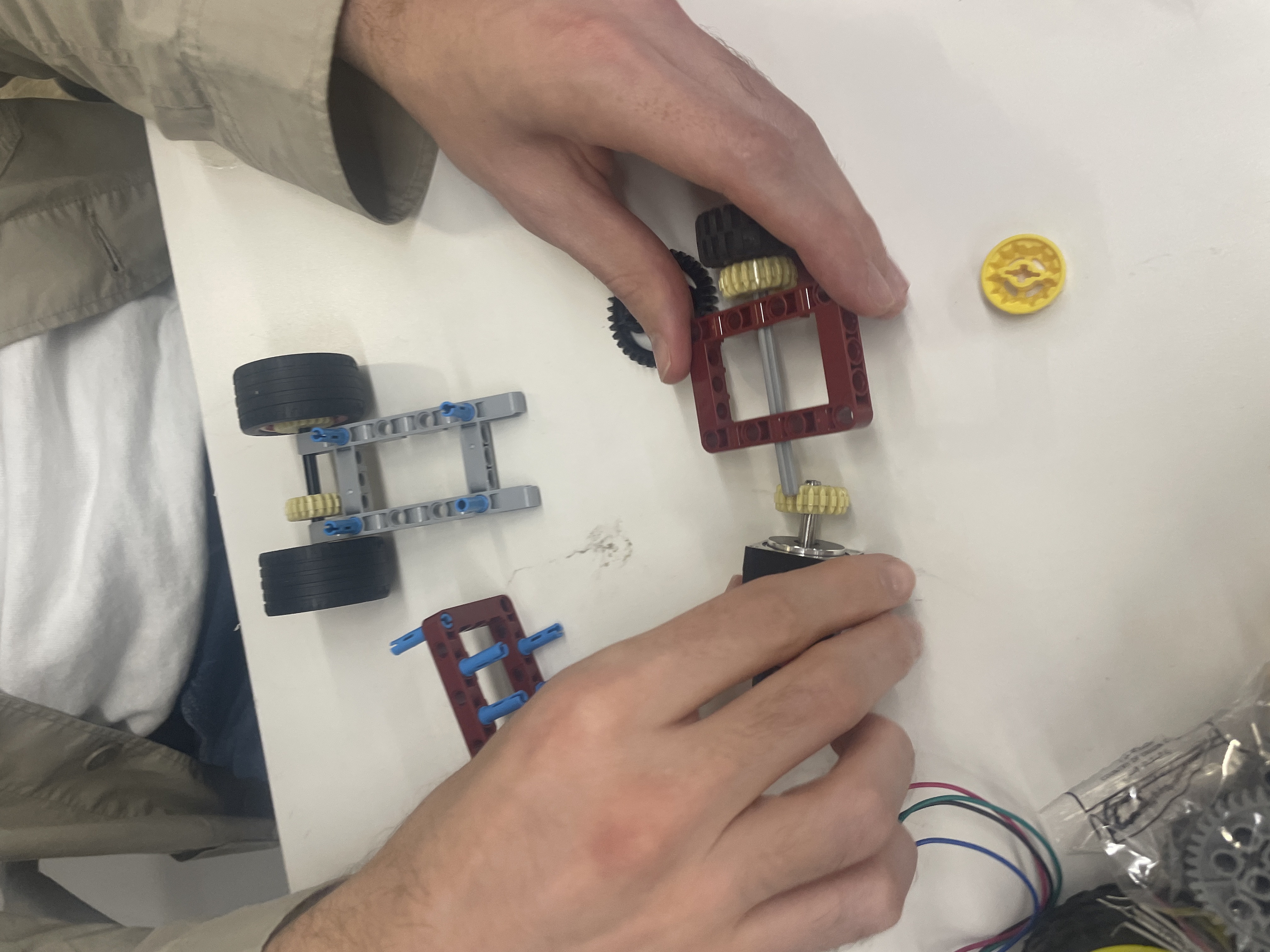
prototypes (thanks leggo<3)
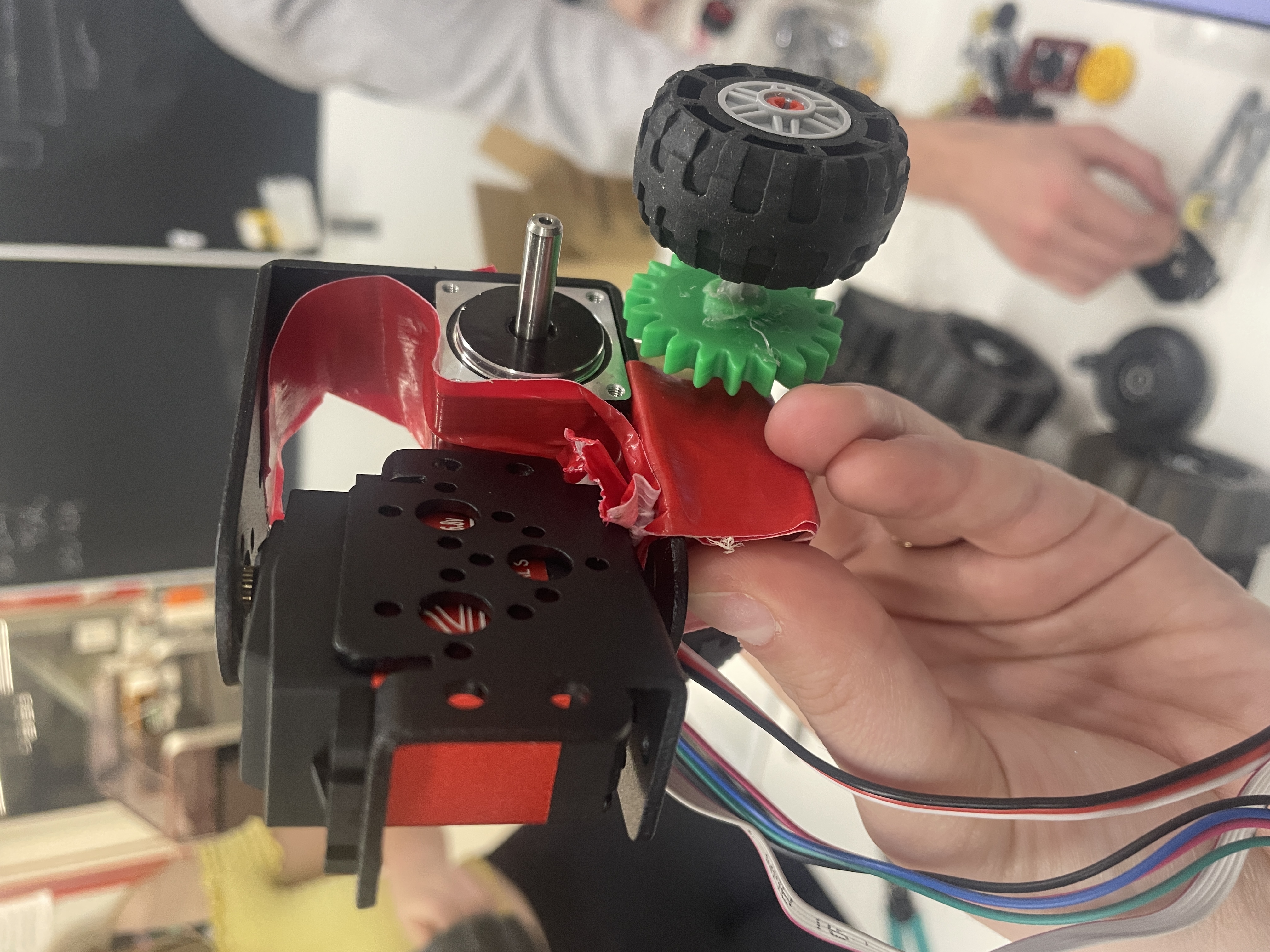
step 3: watch it goooooooo
step 4: reflect
what worked well:
- intra-team work!!
- got it to move!!!
what didn't :(
- inter-team communication
- hard to miniaturize w/ the available resources
- hard to get traction (literally)