~kinetic scultpure~
step 1: inspo
step 2: gear design
design of gears in rhino
step 3: laser cut
design of stand and gears to be laser cut for display
step 4: arduino code
code to switch the motor from clockwise to counterclockwise in one sec intervals with 0.5 sec
in between each transition to allow white things to go up and down
step 5: assemble
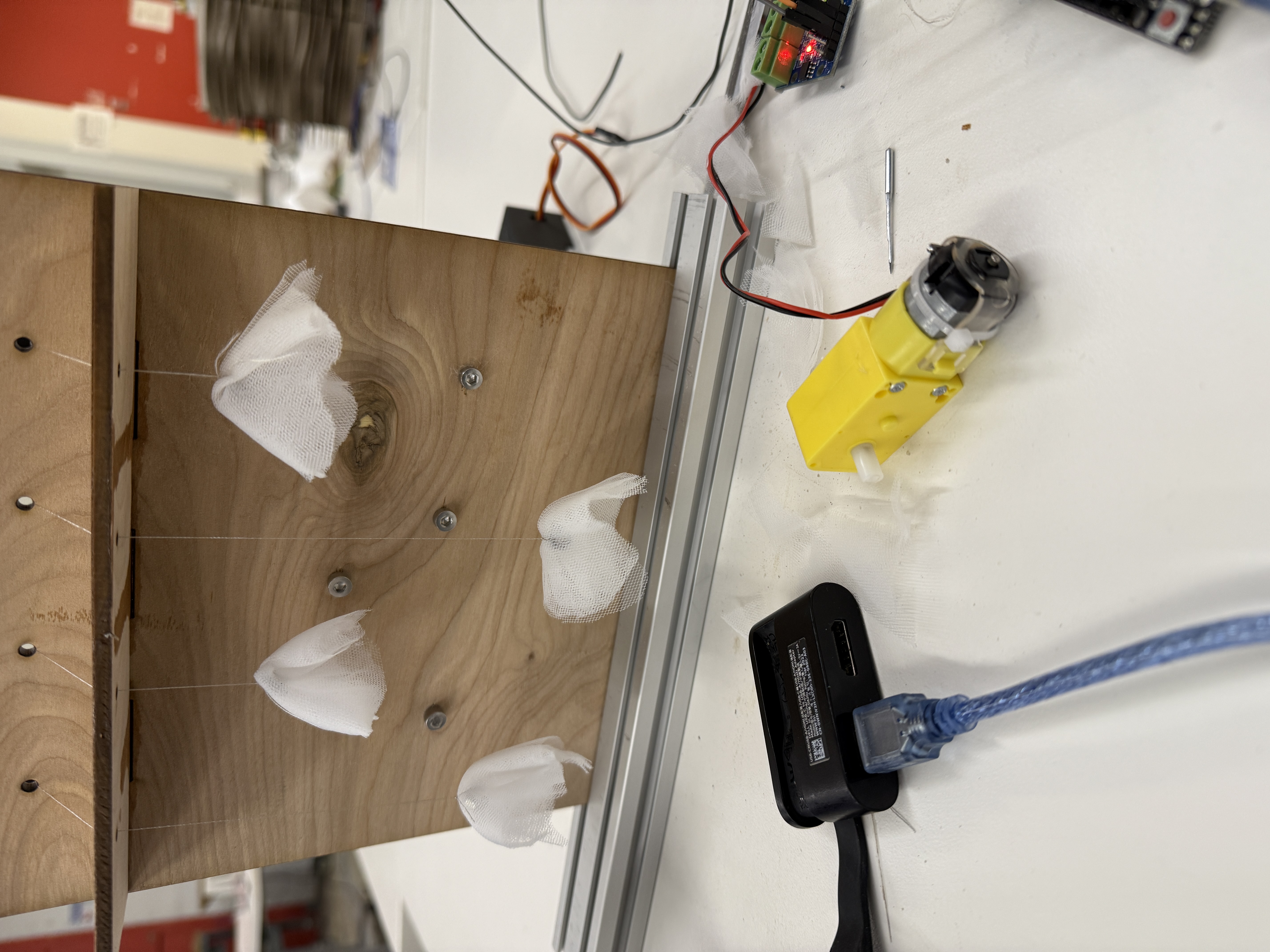
assembly of frame, gears, and motor
step 6: run!!
step 7: reflect
what worked well:
- i liked the shapes of the little white things
- the laser-cut frame slotted in nicely together
- adding nuts inside of the white things helped weigh them down so that they would go back down when gears went counterclockwise
- the set of four gears actually worked for producing variable movements amongst the four white things
what didn't :(
- omf was so hard to actually get the motor to stay connected to the gear
- super violent movements... not very reminiscent of the inspo
- lots of glue on the back
- string used to hold the white things often got stuck in the gears
future improvements
- slow the rate of movement of the motor to prevent so much jerking
- actually measure gear ratios and expected movement of the white things
- make a better coupler for the motor